
- * 프린트는 Chrome에 최적화 되어있습니다. print
인공지능대학원 / Graduate School of Artificial Intelligence

안혜민 Hyemin Ahn
인공지능대학원 / Graduate School of Artificial Intelligence
 +82-52-217-3456
+82-52-217-3456 hyemin.ahn@unist.ac.kr
hyemin.ahn@unist.ac.kr https://sites.google.com/view/ahri-lab
https://sites.google.com/view/ahri-lab Bldg. 106 Rm. 701-2
Bldg. 106 Rm. 701-2
Curriculum Vitae
* Assistant Professor (2022 ~ Present)
- UNIST, South Korea
- AIGS, Dept. of Electrical Engineering.
* Postdoc Researcher (2020 ~ 2022)
- Institute of Robotics and Mechatronics, German Aerospace Center, Germany
- Human-centered Assistant Robotics Group, Technical University of Munich, Germany
- Advisor: prof. Dongheui Lee
* Graduate Research Assistant (2014 ~ 2020)
- Dept. of Electrical and Computer Engineering, Seoul National University, South Korea
- Advisor: prof. Songhwai Oh
Academic Credential
* Ph.D/Ms.C integrated (2020)
- Dept. of Electrical and Computer Engineering, Seoul National University, South Korea
- Advisor: prof. Songhwai Oh.
* Bachelor (2014)
- Seoul National University, South Korea
- Dept. of Electrical and Computer Engineering, Seoul National University, South Korea
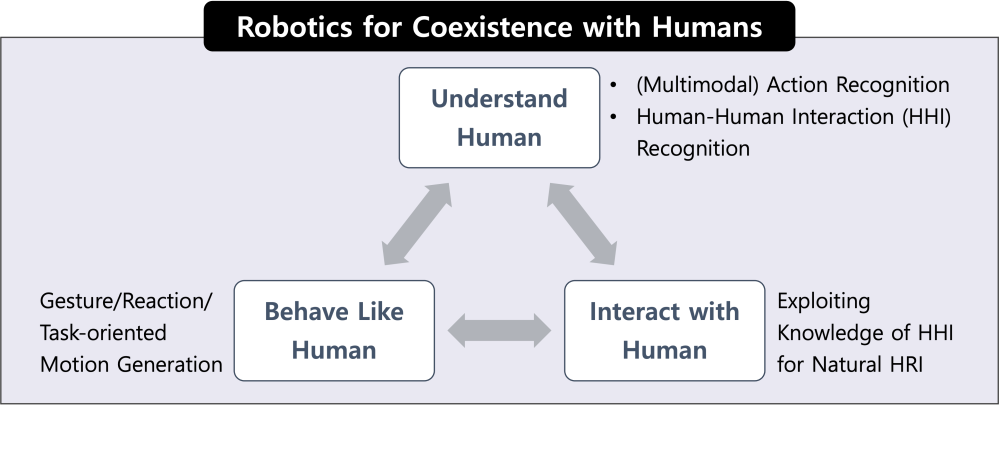
본 연구실의 목표는 인간과 공존가능한 로봇을 위한 인공지능기반 알고리즘을 제안함으로써 우리 사회에 기여하는 것입니다. 해당 목표 달성을 위해, 우리는 다음과 같은 세 가지의 하위 목표들이 달성되어야 한다고 생각합니다. (1) 로봇은 인간을 이해할 수 있어야 합니다 (예: 행동 인식, 감정 인식, 자세 추정), (2) 로봇은 인간처럼 행동할 줄 알아야 합니다 (예: 과제 수행을 위한 동작 계획, 인간다운 동작 생성, 모방 학습), (3) 로봇은 인간과 상호작용 할 수 있어야 합니다 (예: 자연스러운 인간-로봇-상호작용을 위한 행동 계획, 인간-로봇-상호작용을 위한 인간-인간-상호작용 정보 활용). 이를 위해, 우리는 인공지능기반 컴퓨터 비전, 자연어 처리, 그리고 행동 및 동작 계획 알고리즘들을 연구합니다. 최종적으로는 인공지능의 발전된 인지능력을 로봇 행동 계획을 위해 사용함으로써 자연스러운 인간-로봇-상호작용이 가능한 시스템을 구축하고자 합니다.
this goal, we believe the following three sub-goals need to be completed (1) Robots need to understand humans (i.e., Action recognition, Emotion recognition, Human pose estimation), (2) Robots need to behave like humans (i.e., Task and motion planning, Human-like motion generation, Imitation Learning), (3) Robots need to interact with humans (i.e., Behavior planning for natural Human-Robot Interaction (HRI), Human-Human Interaction to Human-Robot Interaction). To this end, we research AI-based Computer Vision, Natural Language Processing, and Motion Planning algorithms. Note that our final objective is to build a system for natural HRI, by making good use of advanced AI-based perceptual abilities to plan appropriate robotic behavior.
Major research field
인간-로봇-상호작용, 인공지능, 딥러닝, 인간 행동 이해, 로봇 동작 생성 / Human-Robot Interaction, Artificial Intelligence, Deep Learning, Action Recognition, Motion Generation
Desired field of research
학습 기반 로봇 행동 계획, 개인화 로봇, 복잡한 과제 수행이 가능한 로보틱스, 감정 이해, 성격 모델링 / Learning-based Robot Behavior Planning, Personal Robotics, Robotics for Complex Task Planning, Emotion Understanding, Personality Modeling,
Research Keywords and Topics
인공지능기반 인간-로봇-상호작용, 모션 생성, 행동 이해, 시각 및 언어 정보 이해
AI-based Human-Robot Interaction, Motion Generation, Action Understanding, Visual and Language Perception.
Research Publications
* "Visually Grounding Language Instruction for History-Dependent Manipulation", Hyemin Ahn*, Obin Kwon*, Kyungdo Kim, Jaeyeon Jeong, Howoong Jun, Hongjung Lee, Dongheui Lee, and Songhwai Oh. (*These authors are equally contributed to this work), Internation Conference on Robotics and Automation (ICRA), 2022.
* "Refining Action Segmentation with Hierarchical Video Representations", Hyemin Ahn and Dongheui Lee, International Conference on Computer Vision (ICCV), 2021.
* "Text2Action: Generative Adversarial Synthesis from Language to Action", Hyemin Ahn, Timothy Ha, Yunho Choi, Hwiyeon Yoo, and Songhwai Oh, International Conference on Robotics and Automation (ICRA), 2018.
* "Online Learning to Approach a Person with No-Regret", Hyemin Ahn, Yoonseon Oh, Sungjoon Choi, Claire J. Tomlin, and Songhwai Oh, Robotics and Automation Letters (RA-L), 2018 (Also published to IROS 2017).
국가과학기술표준분류
- EA. 기계
- EA05. 로봇·자동화기계
- EA0502. 로봇 제어/지능화기술
국가기술지도분류
- 정보-지식-지능화 사회 구현
- 012300. 인공지능/지능로봇 기술